")
Merge branch 'master' of https://gitlab.aicrowd.com/flatland/neurips2020-flatland-starter-kit
# Conflicts: # apt.txt
Showing
- src/extra.py 26 additions, 85 deletionssrc/extra.py
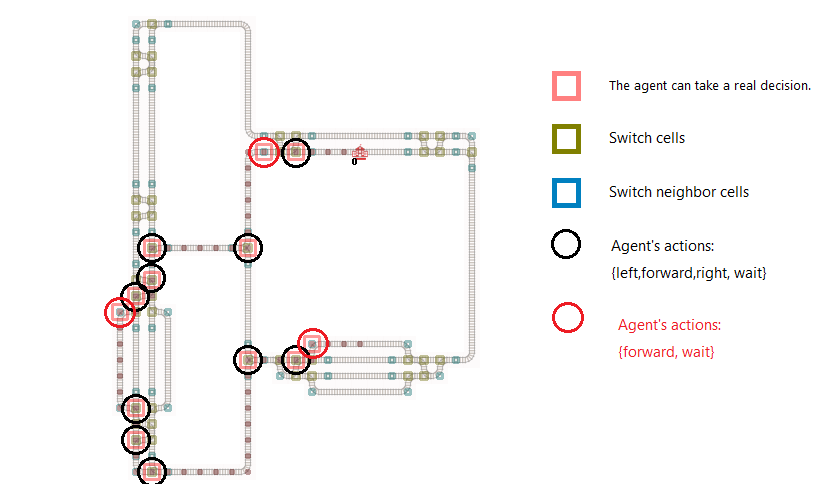
- src/images/adrian_egli_decisions.png 0 additions, 0 deletionssrc/images/adrian_egli_decisions.png
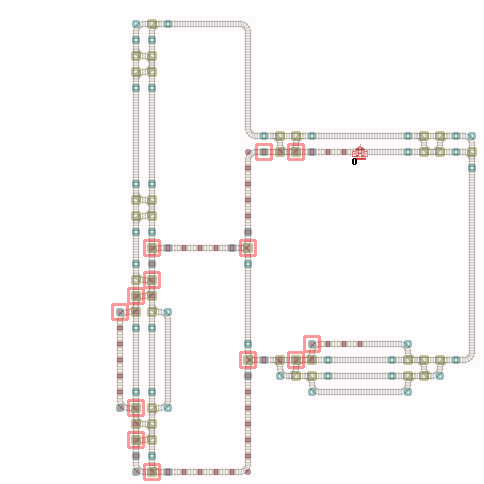
- src/images/adrian_egli_info.png 0 additions, 0 deletionssrc/images/adrian_egli_info.png
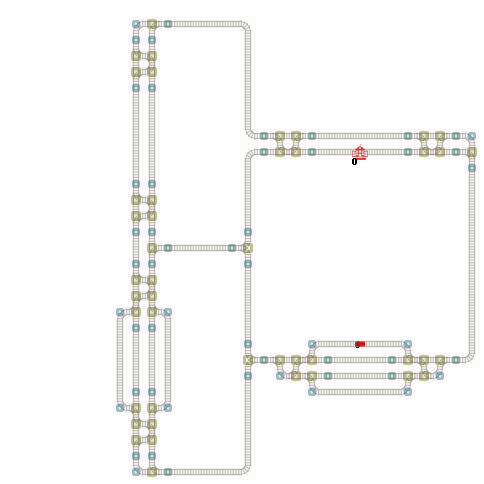
- src/images/adrian_egli_start.png 0 additions, 0 deletionssrc/images/adrian_egli_start.png
- src/images/adrian_egli_target.png 0 additions, 0 deletionssrc/images/adrian_egli_target.png
src/images/adrian_egli_decisions.png
0 → 100644
{kind=link}
49.2 KiB
src/images/adrian_egli_info.png
0 → 100644
{kind=link}

47.8 KiB
src/images/adrian_egli_start.png
0 → 100644
{kind=link}
27.4 KiB
src/images/adrian_egli_target.png
0 → 100644
{kind=link}
30.5 KiB