Showing
- reinforcement_learning/replay_buffer.py 57 additions, 0 deletionsreinforcement_learning/replay_buffer.py
- reinforcement_learning/rl_agent_test.py 92 additions, 0 deletionsreinforcement_learning/rl_agent_test.py
- reinforcement_learning/sequential_agent.py 3 additions, 3 deletionsreinforcement_learning/sequential_agent.py
- reinforcement_learning/sequential_agent_training.py 3 additions, 3 deletionsreinforcement_learning/sequential_agent_training.py
- reinforcement_learning/single_agent_training.py 17 additions, 13 deletionsreinforcement_learning/single_agent_training.py
- run.py 89 additions, 38 deletionsrun.py
- runs_bench/Jan14_10-56-32_K57261_PPO_reduced/events.out.tfevents.1610618195.K57261.15412.0 0 additions, 0 deletions...PPO_reduced/events.out.tfevents.1610618195.K57261.15412.0
- runs_bench/Jan18_09-32-17_K57261_DDDQN_reduced/events.out.tfevents.1610958740.K57261.6608.0 0 additions, 0 deletions...DDQN_reduced/events.out.tfevents.1610958740.K57261.6608.0
- runs_bench/Jan18_09-34-10_K57261_DeadLockAvoidance_EPS_reduced/events.out.tfevents.1610958853.K57261.10660.0 0 additions, 0 deletions...EPS_reduced/events.out.tfevents.1610958853.K57261.10660.0
- runs_bench/Jan18_11-47-54_K57261_DeadLockAvoidance_reduced/events.out.tfevents.1610966876.K57261.4332.0 0 additions, 0 deletions...ance_reduced/events.out.tfevents.1610966876.K57261.4332.0
- runs_bench/Jan18_11-56-16_K57261_DeadLockAvoidanceWithDecision_reduced/events.out.tfevents.1610967379.K57261.14680.0 0 additions, 0 deletions...ion_reduced/events.out.tfevents.1610967379.K57261.14680.0
- runs_bench/Jan18_13-46-59_K57261_MultiDecisionAgent_reduced/events.out.tfevents.1610974021.K57261.12972.0 0 additions, 0 deletions...ent_reduced/events.out.tfevents.1610974021.K57261.12972.0
- runs_bench/Jan18_14-53-57_K57261_PPO_full/events.out.tfevents.1610978039.K57261.484.0 0 additions, 0 deletions...7261_PPO_full/events.out.tfevents.1610978039.K57261.484.0
- runs_bench/Jan18_14-57-56_K57261_DDDQN_full/events.out.tfevents.1610978281.K57261.19984.0 0 additions, 0 deletions..._DDDQN_full/events.out.tfevents.1610978281.K57261.19984.0
- runs_bench/Jan18_16-05-23_K57261_DeadLockAvoidance_EPS_full/events.out.tfevents.1610982327.K57261.6264.0 0 additions, 0 deletions...nce_EPS_full/events.out.tfevents.1610982327.K57261.6264.0
- runs_bench/Jan18_16-14-19_K57261_DeadLockAvoidance_full/events.out.tfevents.1610982862.K57261.14612.0 0 additions, 0 deletions...idance_full/events.out.tfevents.1610982862.K57261.14612.0
- runs_bench/Jan18_16-43-41_K57261_DeadLockAvoidanceWithDecision_full/events.out.tfevents.1610984623.K57261.17628.0 0 additions, 0 deletions...cision_full/events.out.tfevents.1610984623.K57261.17628.0
- runs_bench/Jan18_16-45-04_K57261_MultiDecision_full/events.out.tfevents.1610984709.K57261.1796.0 0 additions, 0 deletions...ecision_full/events.out.tfevents.1610984709.K57261.1796.0
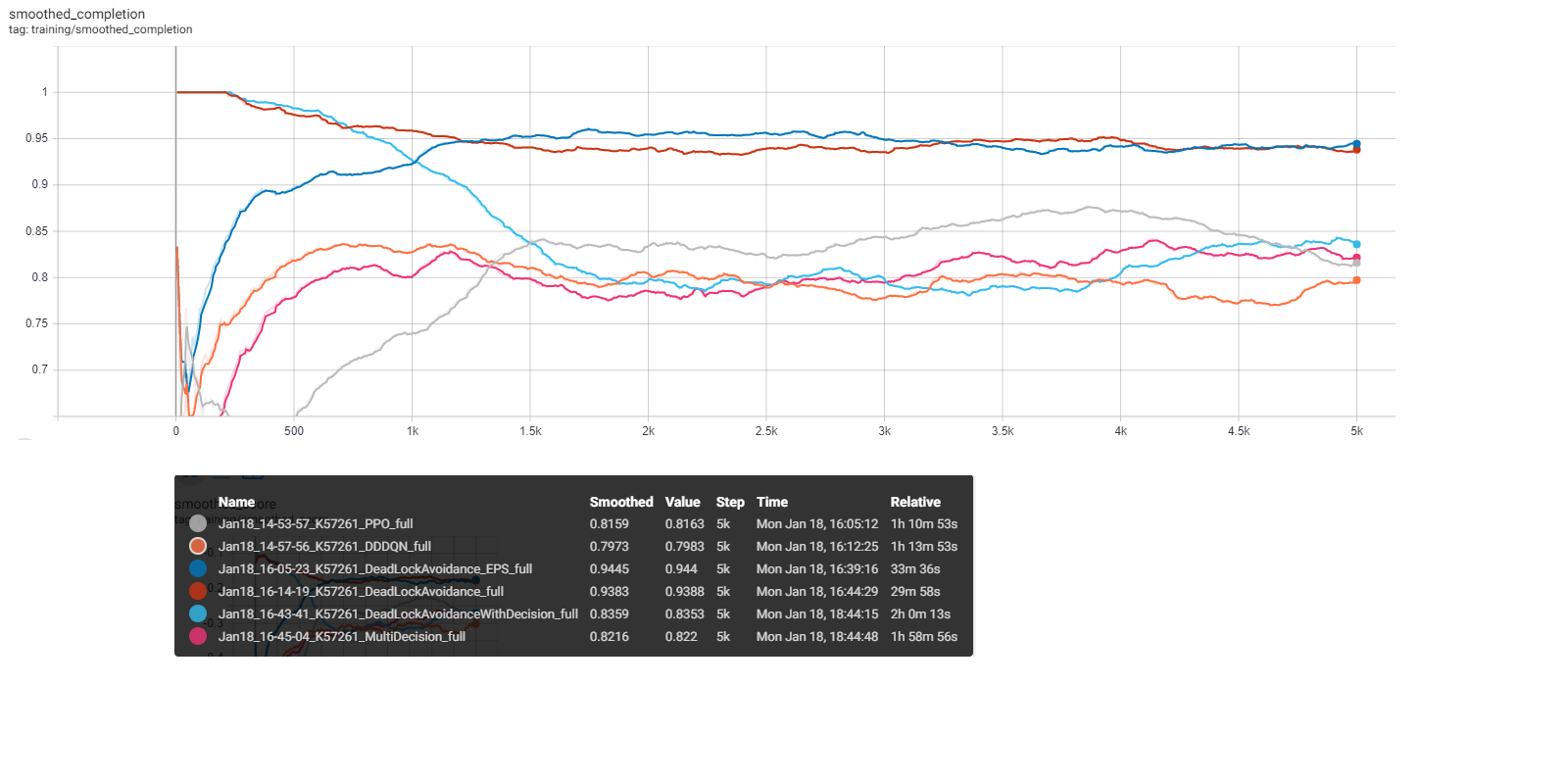
- runs_bench/Screenshots/full.png 0 additions, 0 deletionsruns_bench/Screenshots/full.png
- runs_bench/Screenshots/reduced.png 0 additions, 0 deletionsruns_bench/Screenshots/reduced.png
reinforcement_learning/replay_buffer.py
0 → 100644
reinforcement_learning/rl_agent_test.py
0 → 100644
File added
File added
File added
File added
File added
File added
File added
File added
File added
File added
File added
File added
runs_bench/Screenshots/full.png
0 → 100644
{kind=link}
139 KiB
runs_bench/Screenshots/reduced.png
0 → 100644
{kind=link}

178 KiB